3-DOF Robotic Arm
This project started as a hands-on undergraduate exploration into robotics, where I wanted to turn basic control theory into something tangible. From 3D-printed links to servo wiring and microcontroller programming, the goal was simple: build a small robotic arm that actually moves the way I tell it to.
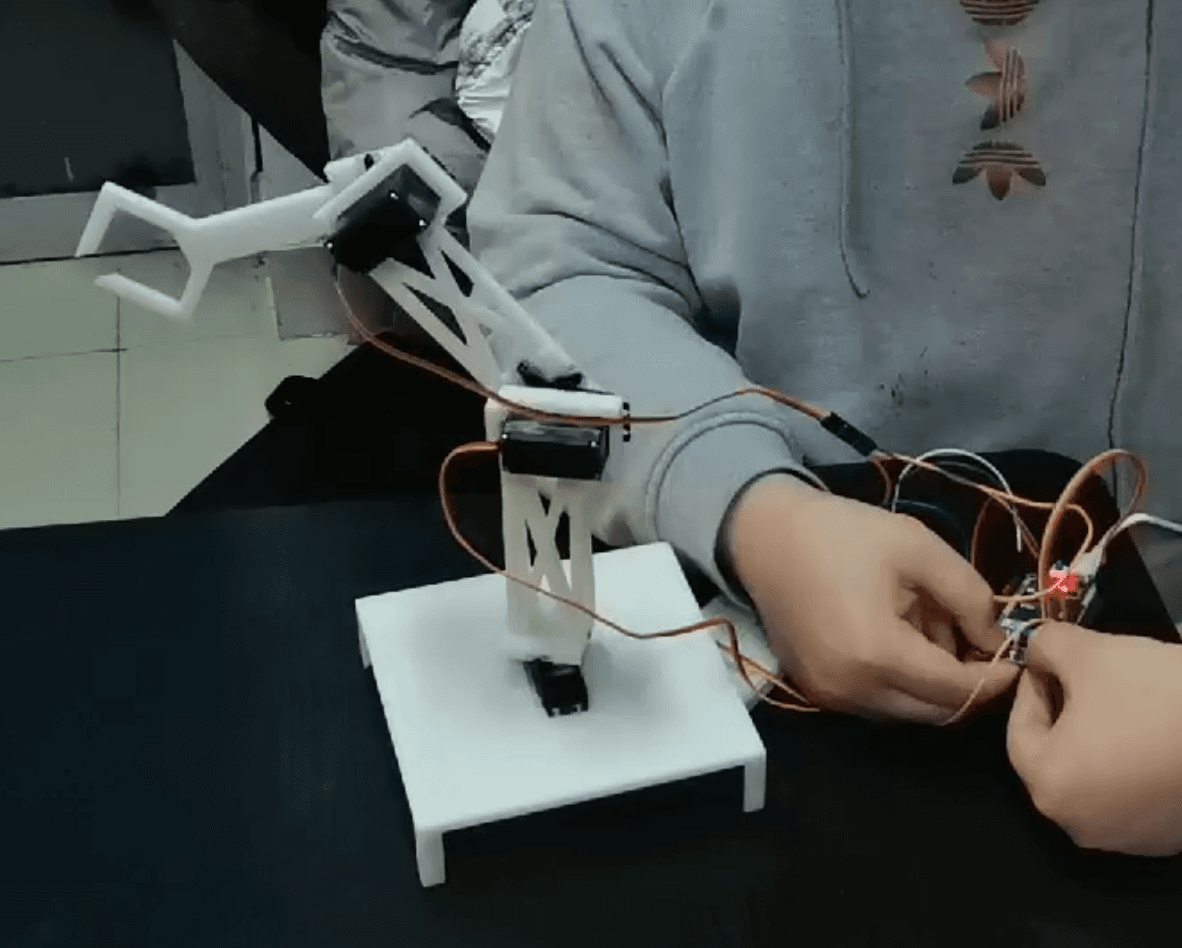
The system is a three-degree-of-freedom robotic arm driven by MG996R servos and controlled by an STC8H8K64U microcontroller. I designed and printed the mechanical structure, wired the hardware on a breadboard, and implemented PWM-based servo control in C.
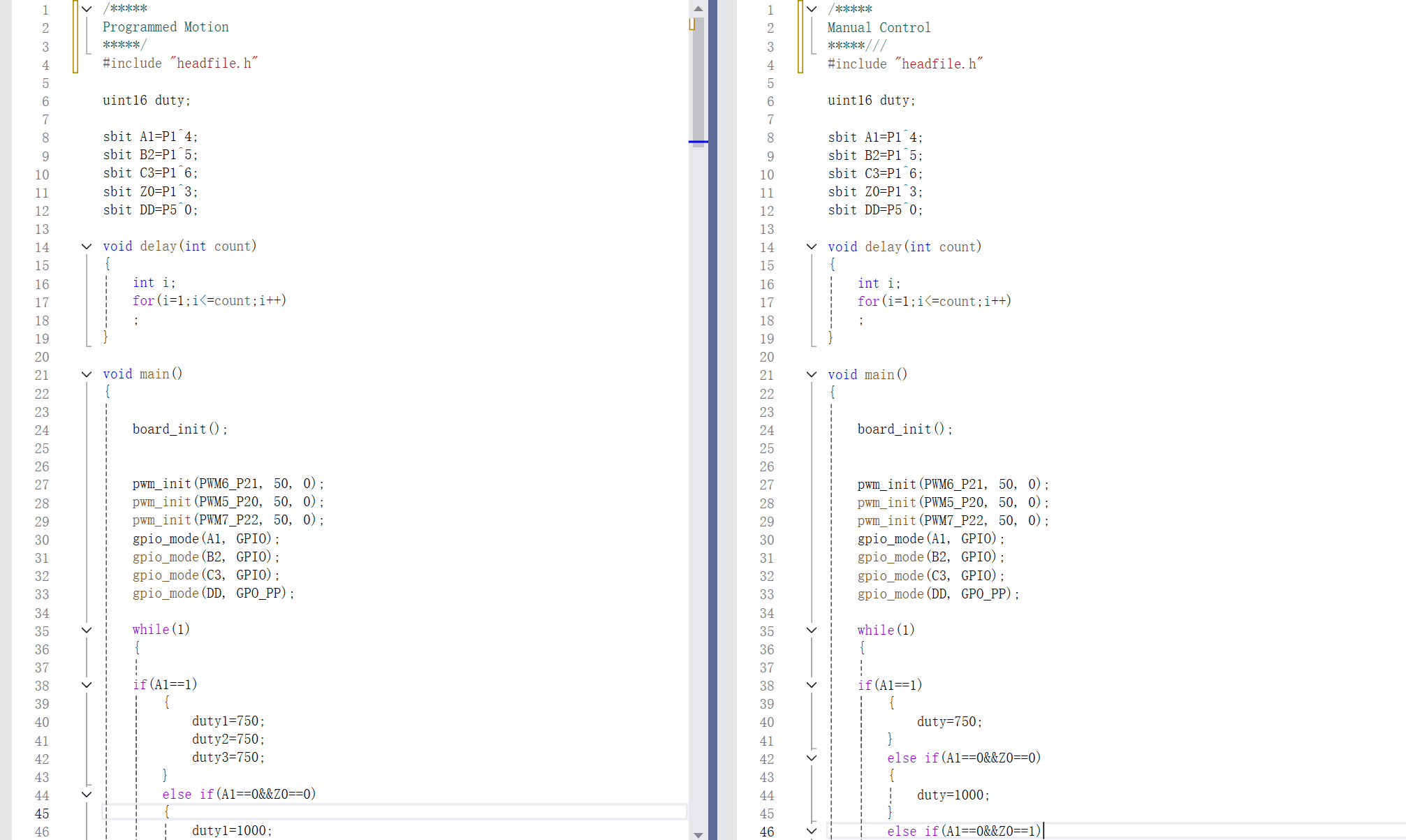
The arm supports both manual input via switches and pre-programmed motion sequences and it is programmed in C. The pre-programmed motion (left) and manual control (right) code are shown below.